Xiaomi Mijia Sweeping Vacuum Cleaner 1C - калибровка датчиков
Не так давно я изложил свои мысли об опыте использования робота пылесоса Xiaomi Mijia Sweeping Vacuum Cleaner 1C. В статье рассказал, что пылесос стал странно себя вести и что решить проблему помогло только отключение и включение режима «Экспериментальные функции» в оригинальной программе MiHome, в модифицированном приложении MiHome от vevs эффект от отключения/включения данного режима не дал результат. К сожалению данное решение имело лишь временный эффект, после, примерно, 10 дней использования проблемы вернулись.
Описание проблемы
Пылесос начинает плохо ориентироваться в пространстве. Это выражается так:
- При уборке змейкой пылесос убирает помещение с небольшой (или большой) диагональю.
- Может поехать из одной части помещения в другую и обратно.
- По нескольку раз хаотично возвращается к уже убранным местам.
- Не может найти базу при возвращении.
- Вместо разворота на месте сдает задом и разворачивается.
- При возвращении на базу очень резко стартует, без бака с водой, с отрывом от пола переднего колеса.
Сброс настроек по умолчанию не помогает.
Решение
На «синем» сайте и в telegram канале kapiba.ru была найдена инструкция технического сервиса по калибровке датчиков пылесоса.
Калибровка датчиков
Для калибровки датчиков потребуется установить модифицированную версию MiHome от vevs (архив версий, зеркало MiHome 6.1.701 от vevs).
Что бы получить доступ к сервисным функциям необходимо в файле плагина /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle исправить строчку:
if (Array.isArray(data.data) && data.data.indexOf(_miot.Service.account.ID) >= 0) {
_this.setState({
isRepairUser: true
});
}
на:
if (Array.isArray(data.data)) {
_this.setState({
isRepairUser: true
});
}
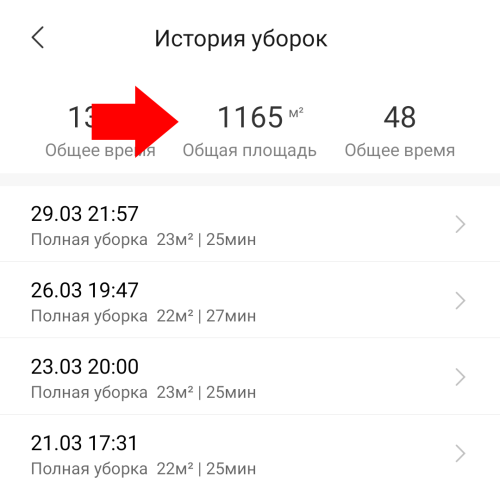
Запускаем MiHome от vevs, переходим в плагин пылесоса -> меню настроек (три точки) -> История уборок -> нажать 10 раз на заголовок со статистикой уборок.
Переходим в меню калибровки сенсоров:

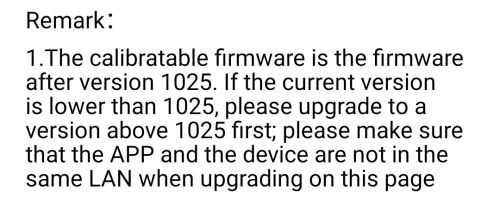
ВНИМАНИЕ! 1. Версия пошивки пылесоса должна быть выше 1025, если версия прошивки ниже, то ее необходимо обновить. 2. Необходимо что бы устройство с приложением, с которого производится калибровка датчиков, было в той же сети что и пылесос.
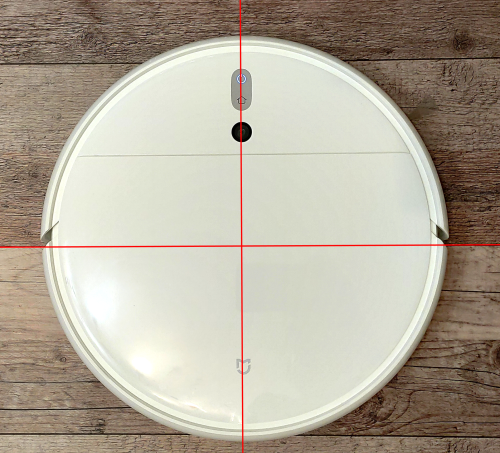
Установить пылесос на ровную поверхность, выровнять пылесос так, чтобы можно было отследить и, если понадобится, потом поправить пылесос после калибровки.
В меню Sensor calibration нажать Gyroscope calibration.
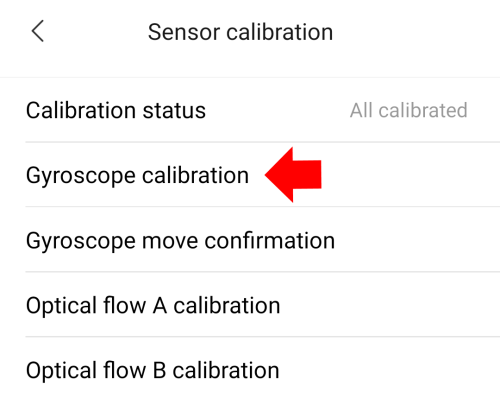
В течении 10 секунд после нажатия робот будет стоять не подвижно, после чего выполнит 10 оборотов на месте. После выполнения 10 оборотов пылесос должен оказаться в том же положении что и вначале.
Если пылесос остановился с большой погрешностью, то руками поворачиваем его в нужное положение, после чего повторяем калибровку.
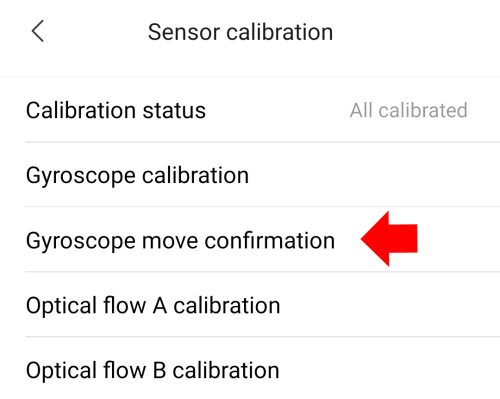
При достижении желаемого результата нажать кнопку Gyroscope move confirmation для подтверждения.
ВНИМАНИЕ! Для следующих двух калибровок необходимо пространство длиной 4 метра, шириной 1 метр.
Установить пылесос на ровную поверхность, нажать Optical flow A calibration.
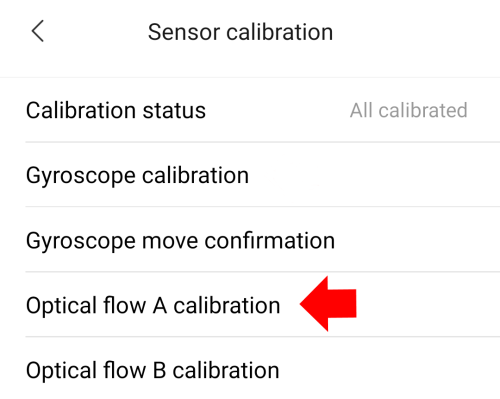
Пылесос подтвердит выполнение команды голосовым сообщением, выполнит проезд по прямой на расстояние 3 метра, развернётся на 180° и вернется в точку отправления. При отклонении от точки старта необходимо поставить пылесос на исходную позицию и повторить попытку еще раз.
Как видно из видео первый запуск был не удачным, что слышно из голосового сообщения. Повторяем запуск.
Выполнить калибровку для режима Optical flow B calibration, выполняется так же, как и Optical flow A calibration.
Тестирование
После завершения калибровки возвращаем пылесос на базу, в приложении MiHome отключаем «Экспериментальные функции», запускаем пылесос на полную уборку. Пылесос должен будет нормально выполнить уборку и успешно вернуться на базу, описанные в начале проблемы должны будут уйти.
По личному опыту пылесос гораздо лучше начинает ориентироваться в пространстве, выполняя переезды между комнатами, не натыкаясь на препятствия и успешно возвращаясь на базу с первого раза.