Xiaomi Mijia Sweeping Vacuum Cleaner 1C - обзор и впечатления после трех месяцев использования
Написать отзыв планировалось еще месяц назад, но как всегда что-то пошло не так, в основном из-за того, что пылесос до сих пор оставляет двоякое впечатление о себе и это оттягивает написание статьи. Но обо всем по порядку.
Для начала определимся о каком пылесосе мы говорим, т.к. оказывается у него имеется несколько обозначений. Модель устройства STYTJ01ZHM, у которой есть две версии: SKV4073CN - версия для китайского рынка, SKV4093GL - версия для всего остального рынка или глобальная версия. Среди коммерческих названий были найдены:
- Xiaomi Mi 1C
- Xiaomi Mijia 1C
- Xiaomi Mijia Sweeping Vacuum Cleaner 1C
- Xiaomi Mijia Robot Vacuum Cleaner 1C
- Xiaomi Mi Robot Vacuum Mop
- Xiaomi Mi Robot Vacuum Mop 1C
- Xiaomi Mijia Mop 1C
Но это все один и тот же пылесос, а разница между китайской и глобальной версией заключается только в вилке шнура питания базовой станции и набором языковых пакетов.
Покупка пылесоса в ближайшее время не рассматривалась ввиду периодических остаточных работ дома после ремонта, но на одной известной китайской торговой площадке на букву A наступило время очередной распродажи и получив хорошую скидку покупка осуществилась сама. Доставка осуществлялась со склада по России и заняла 3 дня.
Технические характеристики
| Модель | STYTJ01ZHM |
| Тип уборки | Сухая, влажная |
| Емкость контейнера для мусора | 600 мл |
| Емкость контейнера для воды | 200 мл |
| Мощность всасывания | 2500 Па |
| Уровень шума | ~70 дБ |
| Площадь уборки | 70 - 100 м2 |
| Время работы | 60 - 90 мин |
| Режимы уборки | 4 режима (Тихий, стандарт, интенсивная уборка, турбо) |
| Батарея | Li-Ion, 2400 мАч |
| Габариты | 353 x 350 x 81,5 мм |
Пылесос имеет самую маленькую батарею среди всей линейки устройств Xiaomi, это стоит учитывать при покупке, т.к. он может не подойти для вашей квартиры.
Время и площадь уборки зависит от типа и режима уборки, влажная уборка потребляет заряд больше, так же, как и интенсивные режимы.
На устройстве нет лидара, только оптические датчики с камерой сверху для улучшенной ориентации по рельефу сверху.
Емкость для влажной уборки оборудована помпой, которая равномерно подает воду на тряпку. У пылесосов предыдущих моделей вода на тряпку подавалась самотеком, что могло привести к образованию лужи под устройством при долгом простое с присоединенным баком.
В этой модели заявлена одна из самых больших мощностей всасывания среди устройств бренда, но надо понимать, что она указана для максимального режима работы турбо, постоянная работа в котором не рекомендуется.
Использование
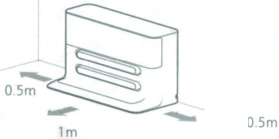
Базовую станцию необходимо установить так, чтобы слева и справа от пылесоса до ближайшего препятствия было по 50 см, сзади от пылесоса не менее метра, лучше не менее полутора. Изначально я установил базовую станцию в угол пол углом 45° и пылесос не мог на нее нормально заехать, ему не хватало места для маневров сбоку. При установке станции зарядки рекомендую сразу приклеить ее к полу двухсторонним скотчем, база, по сравнению с предыдущими моделями, стала меньше и легче, при неудачном заезде на нее и повороте она легко смещается и тогда пылесос на нее может не встать совсем.
Первым делом пылесос необходимо подключить к умному дому Xiaomi, как и другие устройства подключение происходит через программу Mi Home. После подключения следует проверить версию прошивки устройства т.к. на версии 3.5.8_1045 при использовании режима экспериментальные функции есть большая вероятность, что устройство окирпичится. Для подключения и настройки устройства не советую использовать модифицированные версии Mi Home, например, от vevs, только оригинальный, работает гораздо стабильнее и в последствии схватите меньше проблем, с чем связано не знаю, в своем телеграмм канале vevs говорит, что сырость приложения и плагина, особенно для 6й версии Mi Home. Если удалять модифицированную версию не хочется, то лучше использовать оригинальный Mi Home на другом устройстве и настройку производить с него. Почему я так пишу? Потому что выхватил очень неприятную проблему после обновления прошивки с версии 3.5.8_1059 на 3.5.8_1096. Пылесос отлично работал, убирался и с первого раза заезжал на базу, но после обновления он стал жить другой жизнью, он начал хуже ориентироваться в пространстве, а заезд на базовую станцию мог занимать до часа времени, мне для этого в Home Assistant пришлось сделать специальную автоматизацию, что бы после неудачной попытки пылик отправлялся на повторный круг. Таких попыток могло быть много, по времени занимало от 40 минут до часа. Еще пылесос выписывал непонятные финты пытаясь развернуться и сдать назад вместо обычного разворота на месте, при этом упираясь задней частью в стену он несколько секунд пытался преодолеть препятствие или при очередной попытке стартануть в сторону базы без контейнера для воды делал это с такой борзостью, что вставал в вилли. Решилось это только после сброса карты, отключения и, через время, включения экспериментальных функций в оригинальном Mi Home, попытки сброса карт и отключения ЭФ в Mi Home от vevs не давали результата. После сброса проблемы ушли, пылесос с первого раза отстроил карту помещения и сразу запарковался на базе.
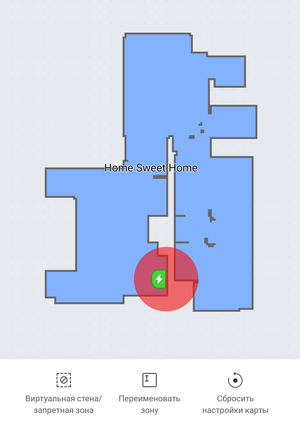
Экспериментальные функции - специальная настройка пылесоса, при включении которой он за несколько уборок строит и запоминает карту помещения. После построения карты пылесос выстраивает уборку так, чтобы она была более быстрой и эффективной. В режиме управление картой появляется карта помещения на которой можно устанавливать виртуальные стены или блоки куда заезжать не надо. С версии прошивки 3.5.8_1096 в картах появилось зонирование, разбиение на зоны делается автоматически, вручную установить границы зон невозможно.
Первые уборки пылесос изучает помещение поэтому они проходят дольше чем последующие (у меня настройка экспериментальные функции включена), после выполнения которых возвращение на базу может происходить не с первой или второй попытки. Изучение помещения надо начинать с базовой станции, в хорошо освещенном помещении (сказывается нехватка лидара), лучше его работу не прерывать, не пользоваться режимом Пульт ДУ, не поднимать и заставить пылесос обязательно самому вернуться на базу, это важно, т.к. после подъема он сбрасывает свое местоположение. Если пылесос не смог сам вернуться на базу и просится на ручки, то в приложении и на устройстве нажать кнопку возврата на базу, он должен сам ее найти, пусть это произойдет и не с первого раза.
После изучения и построения карты запускать можно и в темном помещении, но опыт использования показывает, что при хорошем освещении пылесос лучше видит преграды. После захода на очередную прямую для уборки устройство набирает скорость и если перед ним возникает препятствие, которое он не видит, то происходит довольно ощутимое столкновение пока не сработает механический датчик. При этом светлые препятствия он распознает лучше и заранее сбавляет скорость аккуратно касаясь бампером. Мне пришлось темные препятствия обклеить белой лентой бумажного скотча на уровне передних датчиков, что бы пылесос не врезался в них на полной скорости. Проблему углов пока решить не удалось, если по центру движения есть угол, пусть и светлый (постоянная проблема ножки стола), то вероятность распознать препятствие где-то 50 на 50, может затормозить, а может и въехать на полном ходу.

Качество уборки вполне приемлемое, запустив первый раз, при этом убравшись и намыв полы за два дня до, я не ожидал что будет почти пол контейнера мусора, последующие постоянные уборки раз в день или через день такого эффекта уже не дают, но это говорит уже о том, что дома стало гораздо чище, дома можно ходить босиком. Функция влажной уборки тоже дает свой эффект, конечно с полноценным мытьем полов сравнивать тяжело, но проведя рукой по полу после уборки с тряпкой пыли на руках почти нет, а при ежедневной уборке пыли становится заметно меньше и на мебели. Перед началом влажной уборки тряпку лучше предварительно смочить, т.к. пока из бака попадет достаточное количество воды первые метры будут протираться сухой тряпкой.
Ограничивать доступ пылесоса к различным пространствам можно несколькими способами:
- Установить препятсвия, которые невозможно преодолеть
- Купить и установить магнитную ленту
- Во включенном режиме
эксперементальные функциив разделе управление картой создать виртуальную стену или запретную зону
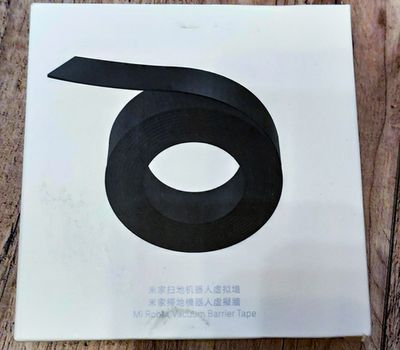
Магнитные ленты продаются на всё той же китайской площадке, либо в магазинах, торгующих техникой Xiaomi. Цена в магазинах города примерно равна покупке в Китае, а можно найти и дешевле.
Если в доме есть ковры, то во время влажной уборки их лучше убрать либо ограничить заезд пылесоса на них на карте или магнитной лентой. Пылесос не умеет определять состояние заезд на ковер с баком и тряпкой, ему будет сложнее передвигаться, он будет пытаться увеличить мощность, что может привести к его повреждению. Ковры с длинным ворсом даются пылесосу тоже тяжеловато, пылесос пытается нарастить обороты схожими с режимами интенсивная уборка и турбо.
Уход очень простой, как только в контейнере скапливается достаточно мусора он очищается, снимается фильтр и всё вместе промывается водой под краном, сушится и устанавливается обратно. Контейнер с водой устанавливается только непосредственно во время уборки. После уборки остатки воды сливаются, снимается тряпка и моется под водой с мылом. Устанавливать контейнер с водой и влажной тряпкой на пылесос для хранения не рекомендуется т.к. она будет преть и начнет неприятно пахнуть. Не забываем периодически протирать бампер и нижние датчики от пыли, производить чистку контактов для зарядки, чистить боковую и нижнюю щетки, они легко снимаются и хорошо чистятся. Для очистки от накрутившихся длинных волос в комплекте есть специальное устройство в виде маленькой расчески с ножом.

Болячки
По поводу болячек, на 4pda есть достаточное количество замечаний на работу устройства, основные проблемы на которые жалуются это отказ материнской платы и батареи. Батарея обычно выходит из строя после постоянных или долгих периодов работы на повышенных режимах, включенных вручную или как вариант чистка ковров с длинным ворсом или баком на хвосте. С материнской платой проблемы не так очевидны, было окирпичивание на прошивке 3.5.8_1045, но есть и другие ситуации, возможно это последствия ударов на большой скорости о препятствия, которые устройство плохо видит (описано выше), возможно еще какая проблема.
На YouTube'чике есть видео сервиса, в котором рассказывается о болячках данного устройства https://www.youtube.com/watch?v=Du-O-TdZKTo
Проблемы, всплывшие у меня. Рассказ про отупение и лечение после обновления до прошивки 3.5.8_1096 я писал выше. Практически сразу скрипело колесико на контейнере для воды, недавно заскрипело переднее колесо, оба вылечил с помощью масла для приборов и шприца.
Итог
Время работы: По моим замерам пылесос убирает 30м2 примерно за 35 минут ±5 минут.
Батарея: На площадь 30м2 уходит примерно 20-30%. Максимум просаживал батарею до 40% остатка, когда час ездил по всей квартире в поиске базы.
Качество уборки: Отлично, про тапки можно забыть.
В целом, эта очень хорошая модель имеющая свои плюсы и минусы.
Плюсы: Цена, она для такого устройства прекрасна. Есть верхняя камера. Влажная уборка, бак имеет помпу, вода подается равномерно. Хорошее качество уборки. Большая мощность всасывания на повышенных режимах работы.
Минусы: Они вытекают из плюсов устройства. Из-за демократической цены пришлось пожертвовать батареей и лидаром. Нет отслеживания заезда на ковер с баком воды. Есть недочеты в работе некоторых узлов устройства.
Для интересующихся пылик был куплен здесь.
Инструкция на русском языке от магазина rumicom user_manual_mijia_1c_rumicom.pdf.
Инструкция на русском языке от магазина xiaomi-store.by user_manual_mijia_1c_xiaomistore.pdf.
Автоматизация Home Assistant
Теперь самое интересное, рассмотрим, что можно автоматизировать в работе устройства :) Кто еще не подключил пылесос к системе автоматизации Home Assistant, читает статью: Xiaomi Mijia Sweeping Vacuum Cleaner 1C интеграция с Home Assistant, в которой еще написано, как через Home Assistant подключить пылесос к умному дому Яндекс и управлять с помощью Алисы.
Ранее было выяснено, что пылесос хорошо ориентируется в освещенных помещениях, меньше врезаясь на полном ходу в различные препятствия. Исходя из этого автоматизации будут следующие:
- При начале уборки запоминается текущее состояние верхнего освещения во всех убираемых помещениях, после чего происходит его включение, отправляется сообщение о начале уборки
- После завершения уборки, когда пылесос отправляется на базу происходит восстановление состояния верхнего освещения во всех помещениях, кроме помещения где расположена базовая станция, отправляется сообщение об окончании уборки
- При неудачной попытке возврата на базу делаем повторную попытку пока уровень заряда более 10%
- При неудачной попытке возврата на базу и уровне заряда менее 11% отправляется сообщение об ошибке
- При удачной парковке на базе происходит восстановление состояния верхнего освещения в оставшемся помещении, отправляется сообщение об успешном возвращении на базу
- После полной зарядки батареи через 20 минут отключается розетка базовой станции
В папке ~/.homeassistant/packages создаем файл vacuum.yaml.
$ touch /home/.homeassistant/packages/vacuum.yaml
Добавляем helpers, в которых будут сохраняться состояния включаемых светильников перед началом уборки.
input_boolean:
# Предыдущее состояние верхнего освещения в комнате
vr_room_light_prev_state:
name: Состоянине освещения в комнате
# Предыдущее состояние верхнего освещения в коридоре
vr_hallway_light_prev_state:
name: Состоянине освещения в коридоре
# Предыдущее состояние верхнего освещения на кухне
vr_kitchen_light_prev_state:
name: Состоянине освещения на кухне
Добавляем автоматизации, при начале уборки в соответствующие helpers сохраняем текущее состояние верхнего освещения. Для каждого светильника будет две автоматизации: первая, если светильник выключен, то сохраняем состояние OFF и включаем светильник, вторая: если светильник включен, то сохраняем только состояние ON.
automation:
# Начало уборки - Сохранение состояния верхнего освещения в комнате - OFF - Включение освещения
- id: 'vr_save_light_state_room_off'
alias: Vacuum Cleaner - Cleaning - Save light state room - OFF - Light ON
trigger:
- platform: state
entity_id: vacuum.racoon
attribute: status
to: cleaning
condition:
- condition: state
entity_id: switch.switch_room_up_light_switch
state: 'off'
action:
- service: input_boolean.turn_off
entity_id: input_boolean.vr_room_light_prev_state
data: {}
- service: switch.turn_on
entity_id: switch.switch_room_up_light_switch
data: {}
mode: single
# Начало уборки - Сохранение состояния верхнего освещения в комнате - ON
- id: 'vr_save_light_state_room_on'
alias: Vacuum Cleaner - Cleaning - Save light state room - ON
trigger:
- platform: state
entity_id: vacuum.racoon
attribute: status
to: cleaning
condition:
- condition: state
entity_id: switch.switch_room_up_light_left_switch
state: 'on'
action:
- service: input_boolean.turn_on
entity_id: input_boolean.vr_room_light_prev_state
data: {}
mode: single
Добавляем такие же автоматизации для каждого включаемого светильника во всех помещениях, где будет происходить уборка, для данного примера это освещение в кухне и коридоре.
Добавляем автоматизацию, которая при начале уборки будет включать розетку базовой станции и отправлять уведомления в раздел Notification и Telegram. Как подключить Telegram описано в статье: Подключение Telegram bot к Home Assistant для доставки уведомлений и управления умным домом.
# Начало уборки - Включение розетки питания базовой станции пылесоса, отправка уведомления
- id: 'vr_clearing_socket_base_on'
alias: Vacuum Cleaner - Cleaning - Socket base ON, send notification
trigger:
- platform: state
entity_id: vacuum.racoon
attribute: status
to: cleaning
condition: []
action:
- service: switch.turn_on
entity_id: switch.socket_room_left_second_switch
data: {}
- service: persistent_notification.create
data:
title: ℹ - Information!
message: Racoon - Start cleaning
- service: telegram_bot.send_message
data:
message: ℹ - Racoon - Start cleaning
mode: single
После завершения уборки, пока пылесос пытается добраться до станции зарядки, отключаем освещение в помещениях где нет базовой станции. Автоматизаций, так же, как и при старте уборки, для каждого helper'а будет две, для оставления света включенным и выключении освещения, если перед началом уборки светильник находился в состоянии OFF.
# Завершение уборки -> Возврат на базу - Восстановления предыдущего состояния освещения на кухне после уборки - OFF
- id: 'vr_restore_light_state_kitchen_off'
alias: Vacuum Cleaner - Returning - Restore light state kitchen - OFF
trigger:
- platform: state
entity_id: vacuum.racoon
from: cleaning
to: returning
condition:
- condition: state
entity_id: input_boolean.vr_kitchen_light_prev_state
state: 'off'
action:
- service: switch.turn_off
entity_id: switch.switch_kitchen_light_switch
data: {}
mode: single
# Завершение уборки -> Возврат на базу - Восстановления предыдущего состояния освещения на кухне после уборки - ON
- id: 'vr_restore_light_state_kitchen_on'
alias: Vacuum Cleaner - Returning - Restore light state kitchen - ON
trigger:
- platform: state
entity_id: vacuum.racoon
from: cleaning
to: returning
condition:
- condition: state
entity_id: input_boolean.vr_kitchen_light_prev_state
state: 'on'
action:
- service: switch.turn_on
entity_id: switch.switch_kitchen_light_switch
data: {}
- service: input_boolean.turn_off
entity_id: input_boolean.vr_kitchen_light_prev_state
data: {}
mode: singleСоздаем подобные автоматизации для всех светильников, включенных перед началом уборки, кроме тех, которые находятся в помещении с базовой станцией.
Добавляем автоматизацию, которая при начале возврата на базу будет включать розетку базовой станции и отправлять уведомления в раздел Notification и Telegram.
# Завершение уборки -> Возврат на базу - Включение розетки питания базовой станции пылесоса, отправка уведомления
- id: 'vr_returning_socket_base_on'
alias: Vacuum Cleaner - Returning - Socket base ON
trigger:
- platform: state
entity_id: vacuum.racoon
from: cleaning
to: returning
condition: []
action:
- service: switch.turn_on
entity_id: switch.socket_room_left_second_switch
data: {}
- service: persistent_notification.create
data:
title: ℹ - Information!
message: Racoon - Cleaning completed
- service: telegram_bot.send_message
data:
message: ℹ - Racoon - Cleaning completed
mode: single
Если попытка возвращения на базу не удалась, то предпринимаем повторную попытку. Попытки возвращения на базу будут предприниматься до тех пор, пока пылесос не заедет на базу или пока заряд батареи не достигнет 10% или ниже.
# Возврат на базу - Повторная попытка возвращения на базу после неудачной предыдущей
- id: 'vr_retry_return_to_base'
alias: Vacuum Cleaner - Returning - Retry return to base
trigger:
- platform: state
entity_id: vacuum.racoon
from: returning
to: idle
condition:
- condition: numeric_state
entity_id: vacuum.racoon
attribute: battery_level
above: '10'
action:
- service: switch.turn_on
entity_id: switch.socket_room_left_second_switch
data: {}
- delay:
hours: 0
minutes: 0
seconds: 5
milliseconds: 0
- service: vacuum.return_to_base
entity_id: vacuum.racoon
data: {}
mode: single
Если заряд 10% и ниже, а пылесосу не удалось вернуться на базу, то повторные попытки вернуться на базу прекращаются и отправляется сообщение о неудаче.
# Возврат на базу - Отправка сообщения после неудачной последней попытки возвращения на базу
- id: 'vr_msg_return_to_base_fail'
alias: Vacuum Cleaner - Returning - Message return to base fail
trigger:
- platform: state
entity_id: vacuum.racoon
from: returning
to: idle
condition:
- condition: numeric_state
entity_id: vacuum.racoon
attribute: battery_level
below: '11'
action:
- service: persistent_notification.create
data:
title: ⚠ - Warning!
message: Racoon - Fail returning to base - Battery low
- service: telegram_bot.send_message
data:
message: ⚠ - Racoon - Fail returning to base - Battery low
mode: single
При успешном возвращении на базовую станцию, восстанавливаем состояние последних светильников и отправляем сообщение об успешном завершении.
# База - Восстановления предыдущего состояния освещения в комнате после уборки - OFF
- id: 'vr_restore_light_state_room_off'
alias: Vacuum Cleaner - Docked - Restore light state room - OFF
trigger:
- platform: state
entity_id: vacuum.racoon
from: returning
to: docked
condition:
- condition: state
entity_id: input_boolean.vr_room_light_prev_state
state: 'off'
action:
- service: switch.turn_off
entity_id: switch.switch_room_up_light_switch
data: {}
mode: single
# База - Восстановления предыдущего состояния освещения в комнате после уборки - ON
- id: 'vr_restore_light_state_room_on'
alias: Vacuum Cleaner - Docked - Restore light state room - ON
trigger:
- platform: state
entity_id: vacuum.racoon
from: returning
to: docked
condition:
- condition: state
entity_id: input_boolean.vr_room_light_prev_state
state: 'on'
action:
- service: switch.turn_on
entity_id: switch.switch_room_up_light_switch
data: {}
- service: input_boolean.turn_off
entity_id: input_boolean.vr_room_light_prev_state
data: {}
mode: single
# База - Отправка сообщения после успешного возвращения на базу
- id: 'vr_msg_return_to_base_successful'
alias: Vacuum Cleaner - Docked - Message return to base successful
trigger:
- platform: state
entity_id: vacuum.racoon
from: returning
to: docked
condition: []
action:
- service: persistent_notification.create
data:
title: ℹ - Information!
message: Racoon - Successful returning to base
- service: telegram_bot.send_message
data:
message: ℹ - Racoon - Successful returning to base
mode: single
После окончания зарядки пылесос переходит в режим ожидания, если в течении 20 минут не происходит никаких изменений, то отключаем розетку питания базовой станции. После отключения станции от питания, через какое-то время пылесос уйдет в сон, для вывода его из этого состояния необходимо будет включить розетку базовой станции.
# База - Отключение розетки базы пылесоса после зарядки
- id: 'vr_socket_base_turn_off'
alias: Vacuum Cleaner - Idle - Turn off Socket after charching
trigger:
- platform: state
entity_id: vacuum.racoon
attribute: status
from: docked
to: idle
for: 00:20:00
condition:
- condition: numeric_state
entity_id: vacuum.racoon
attribute: battery_level
above: '99'
- condition: state
entity_id: vacuum.racoon
state: idle
attribute: status
action:
- service: switch.turn_off
entity_id: switch.xiaomi_socket_room_left_switch
data: {}
mode: single
Можно заметить, что при начале уборки и возвращении на базу в автоматизациях включается розетка питания, это сделано на случай, если кто-то и что-то ее отключит, т.к. во время возврата база должна быть включенной чтобы пылесос ее нашел.